关节机器人
https://www.158jixie.com
-
工业机器人ER130-C204
ER130-C204型四轴码垛机器人末端负载能力为130kg,重复定位精度达到±0.4mm,具有高速码垛搬运功能,高速,稳定,适用于码垛、拆垛等场合。
-
ER165C-C10型机器人
ER165C-C10型机器人整个系统结构紧凑,重复定位精度高,动态性能好,操作简单,采用总线结构,扩展应用方便,能够在点焊、搬运、铸件打磨、激光切割等多个场合进行应用。
-
工业机器人ER210A-C20
ER210A-C20型工业机器人整个系统结构紧凑,腕部持重能力强,动态响应快,操作简单,采用总线结构,扩展应用方便,适用于点焊、大件搬运、铸铁打磨、码垛等场合。
-
工业机器人ER300-C20
ER300-C20型工业机器人腕部持重能力强,过载能力强,重复定位精度较高,采用总线结构,扩展应用方便。适用于重物搬运,码垛等场合。
-
工业机器人ER370-C20
ER370-C20型工业机器人腕部持重能力强,过载能力强,重复定位精度较高,采用总线结构,扩展应用方便。适用于重物搬运、码垛等场合。
-
工业机器人ER180-C204
ER180-C204型四轴码垛机器人末端负载能力为180kg,重复定位精度达到±0.4mm,具有高速码垛搬运功能,高速,稳定,适用于码垛、拆垛等场合。
-
-
-
-
关节码垛式机器人
关节码垛式机器人应用领域:机床上下料、弧焊、点焊、装配、打磨、抛光、分拣、喷涂及码垛搬运等。
-
2kg关节式工业机器人
2kg关节式工业机器人完全独立的多关节工业机器人,柔性高,能适用于范围较大的作业;动作快,反应敏捷—采用高级的伺服控制系统,使机器人能在最佳加速方式下运行,节省工作时间;操作方便,便于用户使用;
-
8kg关节式工业机器人
8kg关节式工业机器人完全独立的多关节工业机器人,柔性高,能适用于范围较大的作业;动作快,反应敏捷—采用高级的伺服控制系统,使机器人能在最佳加速方式下运行,节省工作时间;操作方便,便于用户使用;
-
重载机器人SRB360/500A
全新SRB360/500A系列机型作为重载级的机器人提供了非常大的作业空间。采用钢性的手臂设计,提升了手臂负载能力,扩大了适用范围。水平搬运能力重达500kg,作用半径长达约 2525 mm。在作业空间、动力状态等方面皆具有优异的性能参数,SRB360/500A系列机型凭借其更高的模块化、灵活性和质量而保持技术领先。
-
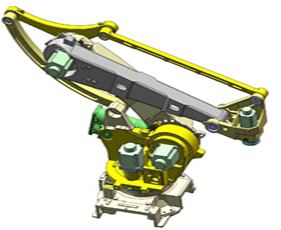
横杆机器人
横杆机器人是舒勒用于机械式和液压式冲压线的最新自动化解决方案。它将经过实际检验的,可靠的机器人技术与横杆技术的优势结合在一起。
-
-
库卡四轴机器人
KR 10 scara R850
敏捷的 KR 10 scara R850 在负载 10 千克时的作用范围是 850 毫米,且具有很高的定位精确性。该款精巧的四轴机器人将高节拍及准确性与经实践检验且操作方便的库卡微机控制系统结合起来
-
库卡六轴机器人 KR 5 sixx R650
KR 5 sixx R650
敏捷、可靠且高性能的六轴机器人的作用范围达 650 毫米。该款精巧的机器人将高节拍及准确性与经实践检验且操作方便的库卡微机控制系统结合起来。
负荷
-
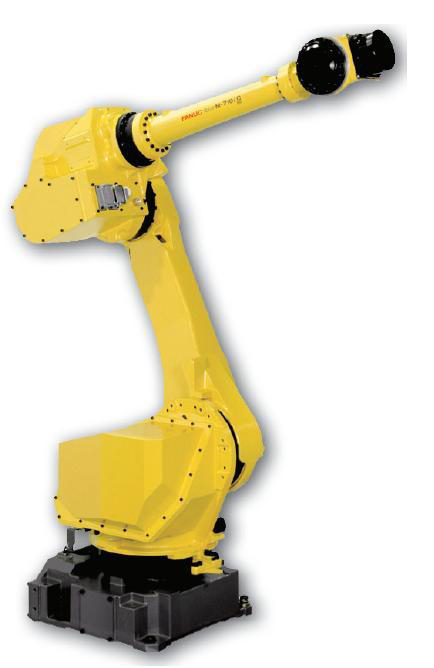
STR系列是采用关节机器人
STR系列是采用关节机器人实现上下料的一种形式,充分利用关节机器人的柔性来实现对工件的传递、输送、装卡。 STR些列属于六轴关节机器人,拥有六个旋转轴,类似于人类的手臂。有很高的自由度,5~6轴,适合于几乎任何轨迹或角度的工作 可以自由编程,完成全自动化的工作 提高生产效率,可控制的错误率代替很多不适合人力完成、有害身体健康的复杂工作。
-
STR系列是采用关节机器人
STR系列是采用关节机器人实现上下料的一种形式,充分利用关节机器人的柔性来实现对工件的传递、输送、装卡。 STR些列属于六轴关节机器人,拥有六个旋转轴,类似于人类的手臂。有很高的自由度,5~6轴,适合于几乎任何轨迹或角度的工作 可以自由编程,完成全自动化的工作 提高生产效率,可控制的错误率代替很多不适合人力完成、有害身体健康的复杂工作。
-
STR系列是采用关节机器人
STR系列是采用关节机器人实现上下料的一种形式,充分利用关节机器人的柔性来实现对工件的传递、输送、装卡。 STR些列属于六轴关节机器人,拥有六个旋转轴,类似于人类的手臂。有很高的自由度,5~6轴,适合于几乎任何轨迹或角度的工作 可以自由编程,完成全自动化的工作 提高生产效率,可控制的错误率代替很多不适合人力完成、有害身体健康的复杂工作。
共128条记录,每页显示20条,当前第4/7页
[首页] [上页] [1] [2] [3] [4] [5] [6] [下页] [尾页]