


摘 要:FARO激光扫描测量系统采用了一种新的测量方式,可以实现接触式和非接触式测量方法的结合。本文采用FARO测量系统,对液力变矩器的几何特征进行接触式测量,对其叶片曲面进行非接触式测量,并将扫描的点云数据导入CATIA软件,重构了液力变矩器泵轮三维几何模型。
关键词:液力变矩器 激光扫描测量 逆向工程 曲面重构
目前,液力变矩器在汽车、工程机械、发电机械、矿业冶金机械及化工机械等行业得到了广泛的应用,汽车行业是液力变矩器的最大用户。液力变矩器是汽车自动变速系统的最重要部件之一,装有液力变矩器的动力传动系统可以保证系统平稳地起步、变速和变矩。
我国液力变矩器的发展主要得益于技术的引进。一项引进技术的应用和开发分为三个 阶段:第一阶段是应用;第二阶段是技术吸收和消化;第三是独立设计和创新。因此,积极开展技术的消化、创新,开发研制具有自主知识产权的液力变矩器产品,并不断地改善其性能,有着广阔的市场前景,对提高我国汽车工业自主开发能力具有现实意义。
国内许多液力变矩器企业已开始运用逆向工程方法实现国外产品技术的消化。逆向工程是一个系统工程,其主要目的是还原实物的数字化CAD模型。其中将产品的形状和数据准确地数字化输入电脑的测量方法,是逆向工程最重要的一个阶段。采用什么样的测量设备,运用什么样测量方法,可以有效、快速、精确地获取液力变矩器物体的数据,也是国内企业研究的课题。
1. 测量方法
为得到产品的形状和几何数据,企业常用的测量方法有两种:一种是接触式的,也是最传统的方法,即采用三坐标测量机进行测量;另一种是较先进的方法,非接触式的扫描测量方法,非接触扫描方式又分白光扫描和激光扫描。
1.1 三坐标测量机测量
用三坐标测量机来扫描是一种常用、经济的方式。测量机的测头分为硬测头和触发式测头。在采集数据点时,测头在目标物体上不断触碰获取一个三维数据点,反复在物体上采点,最后获取一定数量的数据点。该方法与工件表面的颜色和曲率关系不大,设备经济,成本较低。但采点速度慢,触碰物体时,易划伤表面或使表面变形,且测量点需要考虑测头半径补偿问题。
1.2 非接触式测量
与传统三坐标机测量获得的点数据相比,非接触式扫描仪获取的坐标点数据不再是100、1000的数量级可以表示的,而是几百万个数据点。因此,称之为点云。
该系统是用两个不同位置CCD相机对同一个物体进行直接拍摄,且将结构光投影到被测物体表面,通过物体表面对光的反射捕捉点的信息,并通过匹配确定物体上同一点在两幅图像上的对应位置,由视差来计算距离,见图1。

图1 白光测量
近年来,类似白光扫描原理的产品市场上有多种,国外品牌有德国的Breuckmann公司的stereoSCAN 3D和德国G OM公司的AT OS,典型代表产品见图2,中间是普通光源,两端是数码摄像机,将光栅投影在被测物体表面上,通过光栅投影变化获得被测点的数据信息,见图3。国内有北京天远公司的OKIO等。


图2 GOM公司的ATOS 图3 投影光栅
该系统可快速地采集被测物体表面数据,且可通过变换设备角度,获取被测物体不同角度的多幅图像,然后通过特定的算法将不同位置的测量数据拼接起来。虽然两幅图形拼接后的误差可能较小,但由于需要多次的拼接,会导致拼接累积误差较大。此外,它无法精确测量如圆、圆槽和直线等的特征数据,因此,更适合获取汽车、飞机等的外表曲面数据。
1.3 非接触式与接触式结合测量
2004年,美国F A RO产品进入中国市场,它的非接触式与接触式相结合的方法,给逆向工程领域带来一种新的测量方法。它不仅可以实现三坐标测量机对几何特征元素的高精度测量功能,而且还实现了类似白光扫描仪的快速的捕捉点云的功能。
FARO的激光扫描仪是线激光扫描产品的典型代表,其测量原理也是三角法法则。与白光不同的是,其投影在被测物体表面上的是一条激光线,一个数码相机拍摄图像,提取光点的像素坐标,通过标定确定结构光在世界坐标系下的空间位置方程,以及世界坐标系与摄像机坐标系的转换关系,便可以计算出光点在世界坐标系下的坐标。见图4,图5


图4 FARO测量系统 图5 线激光测量
然而,与之前白光扫描系统不同的是,白光系统在做扫描时需要在被测物体上贴上许多参考点,才能最终获取物体的空间三维形状;而FARO扫描系统必须利用机械手臂装置将整个表面的光坐标数据转换成在手臂上统一的三维坐标数据,从而获得每一个光点相对于手臂坐标系的空间X、Y、Z数据,则可得到被测物体表面完整三维数据。
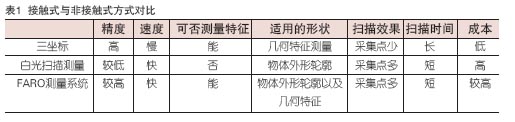
尽管获取被测物体的三维点云数据时,白光系统与F A R O的线激光系统都可以采集几百万的点云数据,但是在一些结构较复杂、不以曲面为主的产品零件,例如液力变矩器、变速箱等,用白光扫描仪只能获取物体外观的曲面点云数据,而一些被遮挡和隐蔽的位置,白光系统的两个数码相机无法同时观察到,将无法获取数据。此外,也无法精确体现出零件上几何特征,如圆、槽等和加工基准与曲面间的位置关系。由于FARO机械手臂的活动自由度很大,因此可以使得在扫描物体时,方便快速灵活地操作,能克服白光系统的这些缺点。通过以上描述,表1总结出三种测量方法的特点。
2. 泵轮的逆向建模
运用FA R O测量系统的接触式和非接触式结合测量的特点,进行点云的数据采集,能有效的开展液力变矩器产品的逆向建模,如图6所示为某款液力变矩器的泵轮实物。

图6 泵轮实物
如图7所示为该泵轮的逆向建模流程,其中的定位实物坐标和扫描实物两个步骤,正是利用FARO测量系统的接触式坐标测量功能和非接触式扫描测量功能的两个特点完成的。
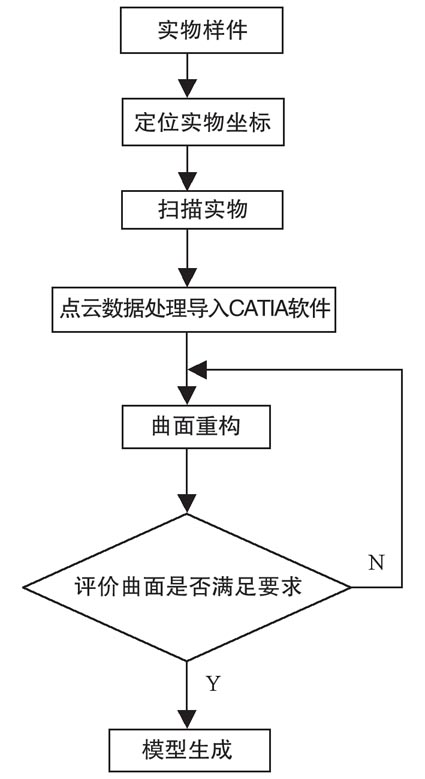
图7 流程图
2.1 泵轮的点云数据采集和定位
如图8所示为采用GOM公司的白光扫描仪所采集的点云数据,从X、Y、Z各个方向都不能体现泵轮的轴向视图,即没有得到合理的定位,这会导致在后期提取一些重要的特征曲线时,所依据的点云参照无法正确的投影。例如,无法用坐标系三个基准平面中任意一个,从点云模型上截取叶轮的外形的轮廓线。再者,中间轴孔的圆心位置用点云拟合,会有较大的误差。而F A R O系统拥有三坐标测量与激光扫描完美结合功能,一是可以对被测物体的数据坐标自由定位;二是可以直接用测出圆、槽等特征的精确坐标位置。
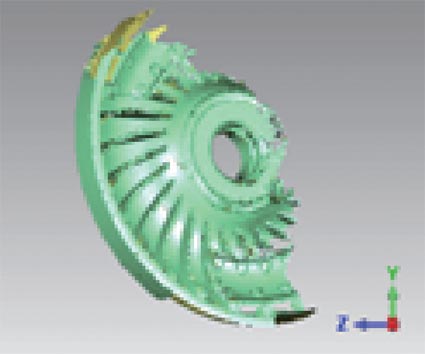
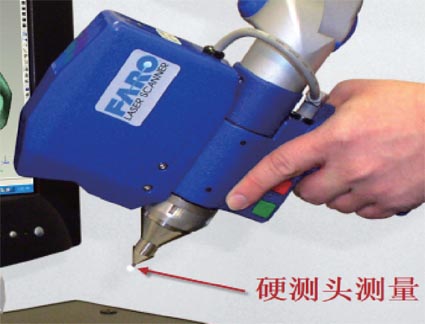
图8 照相式的点云数据图9 FARO测量探头
首先,在泵轮上获取平面、直线、圆3个特征元素。图9表示FARO系统测量系统的结构,图10表示系统的坐标定位软件,图11表示在实物上获取哪些特征在测量结果图形上对应的数据,并可以看到,泵轮的装配轴孔的轴向为坐标系Z轴。

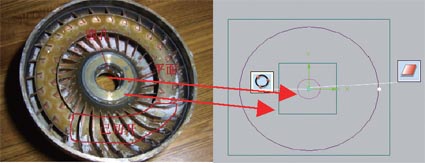
图10 FARO测量软件图11 对应测量特征
泵轮的坐标定位后,即可开始用FARO系统的激光扫描功能对泵轮实物进行数据采集,最后形成的点云数据结果如图12所示。
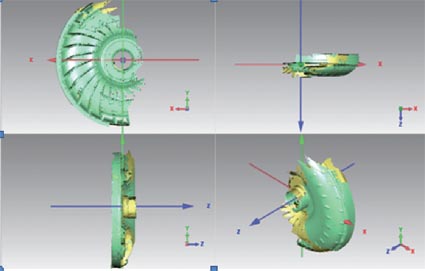
图12 FARO系统定位后获取的点云数据
从图中可以看出,泵轮的点云数据已经合适定位。这也解决了后期逆向工程建模时的定位问题,并且可快速从点云提取特征。
2.2 点云数据处理
由于扫描过程中产生了一些噪音点数据,因此,利用Geomagic软件中强大的点云处理功能,剔除这些数据,并且最后生成三角形网格数据,见图13,并以STL的文件格式输出。

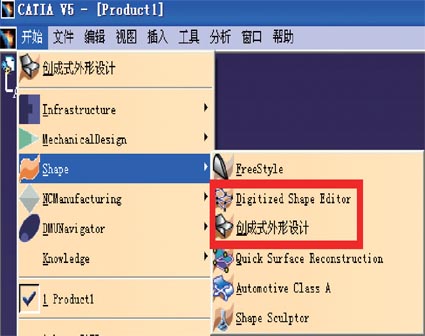
图13 三角形网格图14 CAITA点数字形状编辑器模块
CATIA软件可以在点云模块和建模模块之间互操作,这也是许多设计人员采用CA I TA作为逆向工程首选软件的原因之一。本文主要采用四个模块:数字形状编辑器、自由形状、创成式外形设计、基础设计。
启动CATIA数字形状编辑器模块,见图14,同时,将点云数据导入,效果见图15。
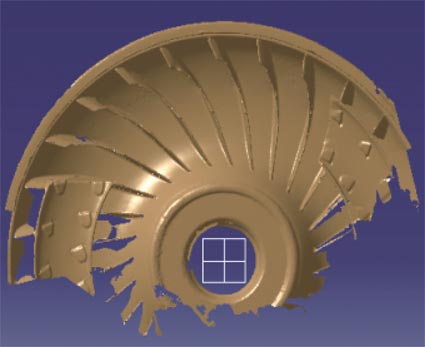
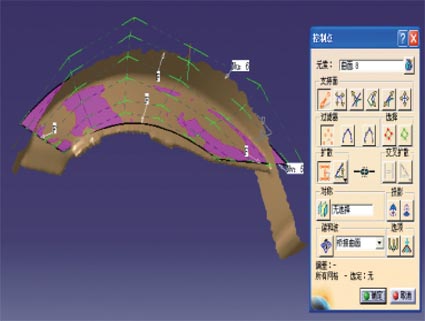
图15 导入的点云数据图16 重构曲面
2.3 曲面重构
叶片曲面是建液力变矩器模的关键。用传统的线构面的方式,很难模拟出与实物接近的曲面,而自由形状曲面能自由设计任何形状的曲面。采用一个U V线6×6阶曲面片通过调整曲面控制点,控制曲面整体与点云模型之间的偏差,获得形状接近点云模型的曲面。最终构造出实物的整体模型,见图16。
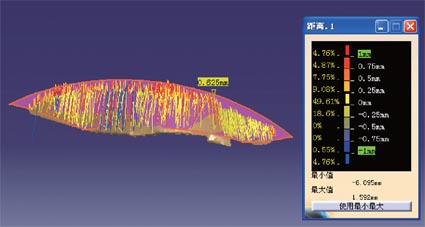
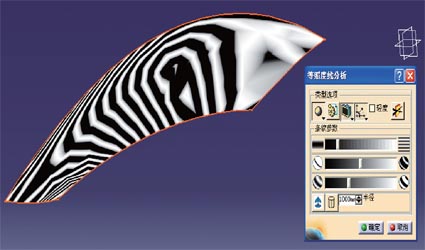
图17 偏差分析图18 光顺性分析
2.4 曲面评价
判断重新设计好的曲面是否满足要求主要依据两方面:一是要求曲面到点云的精度;二是要求曲面的光顺性。从精度方面评价,泵轮的点云模型是否90%以上的数量点与曲面之间的偏差在±0.1mm以内。从光顺性方面评价,斑马条纹状图形在曲面上是否光顺。
2.5 模型生成
在上述评价都满足后,运用创成式外形设计模块,将曲面修剪成叶片形状,最后通过基础设计模块,将曲面转换成实体,完成最后的结构设计。图19是重构后泵轮的实体模型。
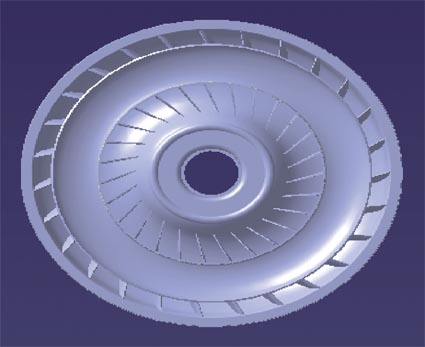
图19 泵轮模型
3. 结 语
利用FA R O激光扫描系统作为逆向工程前期重要的测量工具,解决了以前白光扫描和三坐标测量机无法同时实现特征测量和扫描测量的难题。
(1)用FARO系统测量功能定位液力变矩器的坐标,并获取一些特征的精确尺寸,例如变矩器有效直径、中间轴孔直径与坐标。
(2)用FARO激光非接触式测量功能采集叶片曲面点云数据,用于逆向建模。■
参考文献:
[1] 马文星. 液力传动理论与设计[ M ]. 北京:化学工业出版社, 2004.4.
[2] 李有义等.液力变矩器叶珊系统测量方法[ J ]. 工程机械, 1999(7):31-34.
[3] 赵罡.反求工程技术在液力传动中的应用研究[ D ]. 吉林大学, 2003.
[4] 陆忠东. 基于Pro/Engineer Wildfire的液力变矩器反求设计[ J ].上海电机学院学报. 2007,10(4):269-271.


