


HSR-048/055/065
快速启动。快速持续运行。正确停止。
咨询电话:13522079385
臂长|480・550・650mm
上下行程|100・200・320mm
最大可搬运质量|8kg
标准循环时间|0.28・0.31秒
特长
技术特长
________________________________________

高速运作
实现最高等级的高速运作。通过提高CPM(每分钟转数),可实现高速长时间运行。

连续运转
实现长时间连续运转。
通过提高底座部位的散热性,实现了实际工序中要求的长时间连续运转。
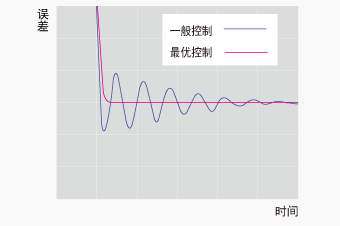
防振控制
通过对机械臂状态的动态控制,可在短时间防止机器人振动。可抑制高速搬运时的振动及残留振动,缩短循环时间。
轻量化
新设计,高刚性、轻量机械臂。
高刚性和轻量化兼顾,实现高可搬运质量(8kg)和高速运作。

设置方向自由度提升
通过轴反转、设置方向可转换。可选择地面安装、吊装。(※安装类型改变时,请询洽。)

最佳配置
将大容量电机与基本组件相统一,通过臂前端轻量化和臂构造最优化,提升其高速性。
选项品
________________________________________

配线辅助臂用保护组件
保护外部配线,防止电缆散乱或断线。

内置以太网规格
机器人主体内置以太网电缆。方便与外部机器连接。
※请另行准备以太网连接器(另售)。
外接电池规格
可将编码器备用电池设置在机器人外部。更换电池更容易,提高了可维护性。

配线保护附带挡块
利用Z轴上部轴承中空孔洞进行配线时,可保护配线。
型号详解
________________________________________
规格
|
项目 |
单位 |
HSR048 |
HSR055 |
HSR065 |
|
|
机械臂全长(第1臂 + 第2臂) |
mm |
480 |
550 |
650 |
|
|
第1臂 |
mm |
205 |
275 |
375 |
|
|
第2臂 |
mm |
275 |
275 |
275 |
|
|
Z轴行程 |
mm |
100/200/320 |
|||
|
可搬运质量 |
kg |
8 |
|||
|
安装方法 |
- |
地面安装型/悬挂安装型 |
|||
|
重复定位精度(工具安装面中心(1)) |
J1+J2 |
mm |
±0.01 |
±0.012 |
±0.012 |
|
Z |
mm |
±0.01 |
±0.01 |
±0.01 |
|
|
T |
deg |
±0.004 |
±0.004 |
±0.004 |
|
标准型
|
|
HSR048A1-N/S* |
HSR055A1-N/S* |
HSR065A1-N/S* |
|
|
机械臂全长 |
205 (J1:第1臂)+275 (J2:第2臂)=480mm |
275 (J1:第1臂)+275 (J2:第2臂)=550mm |
375 (J1:第1臂)+275 (J2:第2臂)=650mm |
|
|
动作角度 及 行程 |
J1 (第1轴) |
±130° |
||
|
J2 (第2轴) |
±143.5° |
±150° |
||
|
Z (第3轴)(*) |
*=10:100mm |
*=10:100mm |
*=10:100mm |
|
|
T (第4轴) |
±360° |
|||
|
轴组合 |
J1 (第1轴)+J2 (第2轴)+Z (第3轴)+T (第4轴) |
|||
|
最大可搬运质量 |
8kg |
|||
|
合成最大速度 |
机械臂前端 |
7,540mm/s |
8,000mm/s |
8,850mm/s |
|
Z和T |
Z (第3轴): |
Z (第3轴): |
Z (第3轴): |
|
|
重复定位精度(环境温度恒定) |
J1+J2 |
±0.01mm |
±0.012mm |
|
|
Z |
±0.01mm |
|||
|
T |
±0.004° |
|||
|
最大压力输入(向下) |
98N (1秒以下) |
|||
|
最大容许惯性力矩 |
0.12kgm2 |
|||
|
位置检测方式 |
绝对编码器 |
|||
|
驱动电机、制动器 |
带全轴AC伺服电机 Z轴、T轴:带制动器 |
|||
|
制动器解除操作 |
UL规格以外 |
1. 1. 仅在直接模式时,通过打开制动器解除开关,解除制动器 2. 2. 通过TP、MP操作解除制动器 |
||
|
UL规格 |
1. 1. 在控制器电源ON时,通过打开制动器解除开关,解除制动器 2. 2. 不可通过TP、MP操作解除制动器 |
|||
|
用户用气动配管 |
4系统 (φ4×2、φ6×2) |
|||
|
用户用信号线 |
・19芯(近接传感器等的信号线) |
|||
|
空气源 |
常用压力 |
0.05~0.35MPa |
||
|
最大容许压力 |
0.59MPa |
|||
|
空气传播噪音(A加权等效连续声压级) |
80dB以下 |
|||
|
质量(2) |
约31 kg (约68.4 lb) |
约31.5 kg (约69.5 lb) |
约32 kg (约70.6 lb) |
|
蛇管型
|
|
HSR048A1-N/S* |
HSR055A1-N/S* |
HSR065A1-N/S* |
|
|
机械臂全长 |
205 (J1:第1臂)+275 (J2:第2臂)=480mm |
275 (J1:第1臂) +275 (J2:第2臂) =550mm |
375 (J1:第1臂) +275 (J2:第2臂) =650mm |
|
|
动作角度 及 行程 |
J1 (第1轴) |
±130° |
||
|
J2 (第2轴) |
±143.5° |
±150° |
||
|
Z (第3轴)(*) |
*=17:170mm |
*=17:170mm |
*=17:170mm |
|
|
T (第4轴) |
±360° |
|||
|
轴组合 |
J1 (第1轴)+J2 (第2轴)+Z (第3轴)+T (第4轴) |
|||
|
最大可搬运质量 |
8kg |
|||
|
合成最大速度 |
机械臂前端 |
7,540mm/s |
8,000mm/s |
8,850mm/s |
|
Z和T |
Z (第3轴): |
Z (第3轴): |
Z (第3轴): |
|
|
重复定位精度(环境温度恒定) |
J1+J2 |
±0.01mm |
±0.012mm |
|
|
Z |
±0.01mm |
|||
|
T |
±0.004° |
|||
|
最大压力输入(向下) |
98N (1秒以下) |
|||
|
最大容许惯性力矩 |
0.12kgm2 |
|||
|
位置检测方式 |
绝对编码器 |
|||
|
驱动电机、制动器 |
带全轴AC伺服电机 Z軸、T軸:带制动器 |
|||
|
制动器解除操作 |
UL规格以外 |
1. 1. 仅在直接模式时,通过打开制动器解除开关,解除制动器 2. 2. 通过TP、MP操作解除制动器 |
||
|
UL规格 |
1. 1. 在控制器电源ON时,通过打开制动器解除开关,解除制动器 2. 2. 不可通过TP、MP操作解除制动器 |
|||
|
用户用气动配管 |
4系统 (φ4×2、φ6×2) |
|||
|
用户用信号线 |
・19芯(近接传感器等的信号线) |
|||
|
空气源 |
常用压力 |
0.05~0.35MPa |
||
|
最大容许压力 |
0.59MPa |
|||
|
空气传播噪音(A加权等效连续声压级) |
80dB以下 |
|||
|
质量(2) |
约31 kg (约68.4 lb) |
约31.5 kg (约69.5 lb) |
约32 kg (约70.6 lb) |
|


