

激光干涉仪是以干涉测量法为原理,利用激光发射光源作为长度基准,对数控设备(加工中心、三坐标测量机等)的位置精度(定位精度、重复定位精度等)、几何精度(俯仰扭摆角度、直线度、垂直度等)进行精密测量的精密测量仪器。
激光具有三个重要的特性:①波长稳定②波长短③具有干涉性。
线性移动都是波浪形的,只是误差多少而已
光的相长干涉和相消干涉:
蓝色是本身的数据
黄色是补偿理论数据
黑色/红色(补偿数据错误会加大机床误差)是补偿后的数据

机床丝杠轻微磨损是可以补偿修正的,严重磨损是无法恢复精度
激光干涉仪原理如下图所示:



一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。另一个角锥反射镜相对于分光镜移动,形成变化长度测量光束。从图中可以看出在干涉仪装置中需要用到分光棱镜,。
需要安装环境湿度探测仪,温度传感器
从主机激光头射出的激光光束
具有单一频率,标称波长为633nm,长期波长稳定性(真空中)优于0.05ppm。
当此光束到达偏振分光镜时,被分成两束光——反射光束和透射光束
这两束光被传送到各自的角锥反射镜中,然后反射回分光镜中,在嵌于激光头中的探测器中形成干涉光束。
如果两光程差不变化,探测器将在相长干涉和相消干涉的两端之间的某个位置观察到一个稳定的信号。
如果两光程差发生变化,每次光路变化时探测器都能观察到相长干涉和相消干涉两端之间的信号变化。这些变化(条纹)被数出来,用于计算两光程差的变化。测量的长度等于条纹数乘以激光波长的一半。
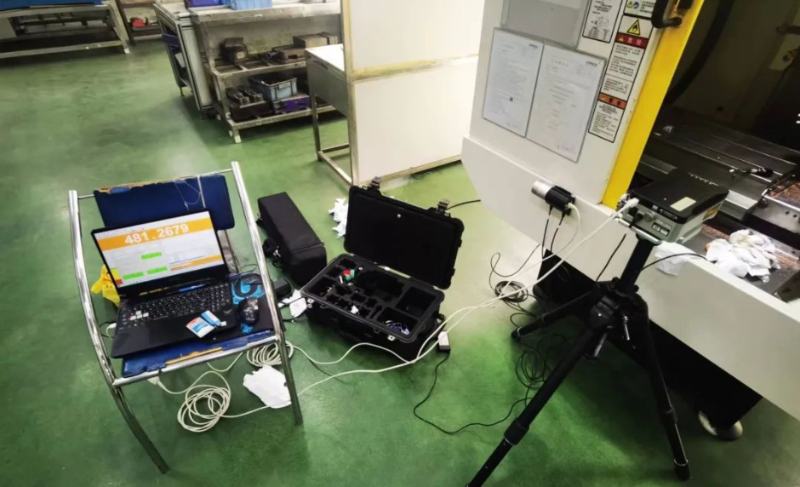
以下是数据检测案例
数据检测出(机床默认值)

移动的数据不是直线的,基准到最远段相差0.1mm
补偿修正后

数据补偿后精度恢复到基准到最远端波动0.012mm


