一、方案背景
考虑到工业机器人普遍具备6个自由度,在笛卡尔空间中能轻松实现X,Y,Z,A,B,C 六维刚体运动,所以若把工业机器人变身为数控机床,能扩大加工范围,实现车铣、车削、车磨、铣削等复合机加工应用,是业内的一个共通理想。
现实情况是工业机器人的轨迹精度不够高,以KUKA Quantec系列机器人为例,其轨迹绝对精度在1mm量级,而数控机床普遍加工精度量级≤1丝(0.01mm)。所以把工业机器人用于机加工仍存在诸多难点及痛点。
在某些精度要求不是特别高的打磨、抛光、去毛刺等预加工处理,以及某些非金属材质的铣削加工如木材、塑件、3D打印件等,应用工业机器人来替代数据机床完成机加工已经变成了一个研究热点。
二、德国模式
德国有一家公司叫西门子公司,西门子PLC、数控系统全球知名;还有一家公司叫库卡机器人公司,其工业机器人比较知名(被美的收购后知名度提升)。
库卡机器人采用的永磁同步伺服电机是由德国西门子提供的专用型号。
库卡机器人在被美的全资收购之前,德国政府监管层寻求西门子公司并购库卡机器人以防止德国技术被中资掌握,但西门子公司不为所动,一是有些看不上产品利润较低的库卡机器人,二是如果西门子也要造工业机器人的话,以其技术实力,那是轻而易举之事。
2015年笔者参加KUKA德国总部培训,由德国工程师做的“西门子数控系统与库卡机器人融合”的专题报告:西门子数控系统多轴运动控制技术完全可以替代库卡机器人控制器,实现对机器人6个关节伺服轴的联动控制,实现铣削等多种复合机加工应用。
三、解决方案
(1)软件:
KUKA.CNC SINUMERIK:
由KUKA机器人提供的工艺软件包,用于连接西门子840D sl数控系统与KUKA KRC4机器人控制柜。
KUKA.CNC工作原理

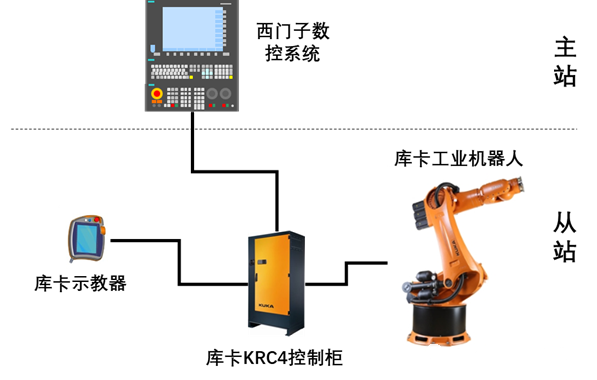
由数控系统做主站,机器人做从站;
G代码中的运动指令由机器人执行;
路径规划在SINUMERIK中执行;
工业机器人仅作为机加工工具。
(2)硬件:
西门子840D SINUMERIK
作为上位机控制器,负责路径规划、指令发送。

KUKA KRC4控制柜:
作为从站控制器,负责接收、执行主站指令。

西门子ET200S模块:
高速通讯版,用于总线数据交换。

(3)通讯:
须安装KUKA.ProfiNet/ProfiSafe软件包,以支持PROFINET(PROFISAFE)通讯,网络拓扑结构如下图所示: