

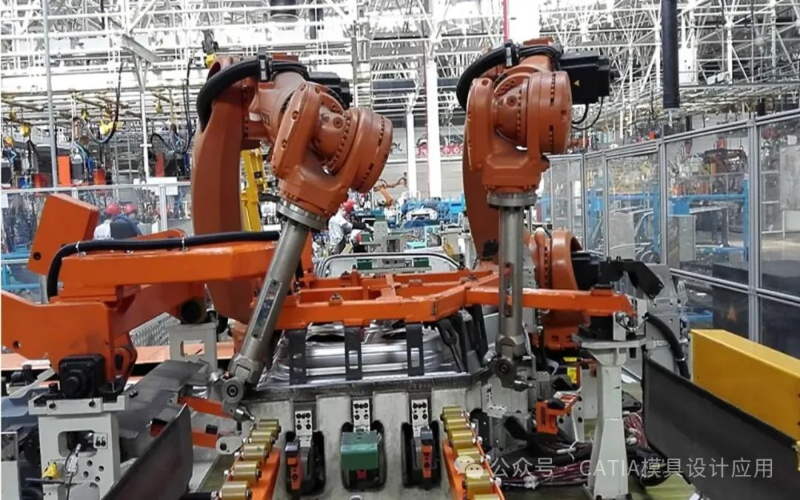
机器人滚边是一种自动化的包边技术,广泛应用于汽车制造等领域,用于门盖、翼子板、顶盖及侧围轮罩等车身部件的制造。这项技术通过在机器人的手臂末端安装滚轮,沿着板件折边线进行滚压包边,可以替代传统的压合包边工艺。机器人滚边具有柔性好、适用于大角度包边需求的优势,但其生产效率通常低于传统的压机包边。随着技术的发展,机器人滚边的生产效率也在逐步提高,目前已能达到较高的生产能力。

机器人滚边的过程通常包括定位夹紧、预滚边和终滚边三个步骤。在滚边过程中,机器人的路径设置采用正反方向交叉式,以防止堆料缺陷的产生和避免尺寸误差的累积。滚边压力和速度是影响滚边质量的关键工艺参数,需要根据工件材质、几何结构及滚边类型等具体情况进行调整。
机器人滚边技术的应用可以提高生产效率、减少人工成本、提高产品质量,并且具有较高的柔性化程度,能够适应不同车型和车身部位的包边需求。随着技术的不断完善,机器人滚边在智能制造领域的应用前景广阔。

机器人滚边的优点:
设备一次性投入少,维护成本低:机器人滚边系统通常包括滚边夹具系统、滚轮系统、机器人及其控制系统,相比传统压机包边,机器人滚边的设备成本较低,且维护成本也较低。
柔性化程度高:机器人滚边技术适合各种不同生产节拍的要求,能够适应多样化的生产需求。
占地面积小:机器人滚边的胎模设计更为紧凑,占用的空间相对较小。
提高外观质量:机器人滚边可以实现外表面光整平滑,没有压痕、凹陷等缺陷,提高了零件的成形外观质量。
增加整体强度和刚性:滚边过程中,机器人滚边能够更好地控制包边的力度和均匀性,从而增加产品的整体强度和刚性。
作业面积小,柔性化制造:机器人滚边技术可以实现更紧凑的生产线布局,提高生产的灵活性和适应性。

机器人滚边的缺点:
机器人滚边技术的初始投资和学习曲线可能相对较高,需要专业的操作和维护人员。
机器人滚边的速度可能不如传统压机包边快,尤其是在大批量生产时,这可能会影响整体的生产效率。
综上所述,机器人滚边在提高产品质量、降低维护成本和增加生产灵活性方面具有明显优势,尤其适合现代汽车制造等对质量和柔性化生产有高要求的行业。然而,其在速度和初期投资方面可能不如传统压机包边。

在机器人滚边过程中确保尺寸精度和质量控制的关键在于以下几个方面:
精确的机器人控制系统:机器人及其控制系统用于控制滚轮的运动轨迹和滚边压力,以及机器人与其他相关系统之间的通信。通过精确控制,可以确保滚边过程的重复性和准确性。
高质量的滚边胎模定位系统:该系统确保待滚边零件在滚边模具上的正确位置,这对于保持尺寸精度至关重要。定位系统的精度直接影响滚边质量。
优化的滚边工艺参数:包括滚边压力、速度、滚轮与工件的相对位置等。这些参数需要根据不同的工件材料和设计要求进行优化,以避免如翻边起皱等质量问题。
质量检测和监控:在生产过程中实施监控,包括使用量规和其他检测工具定期检查滚边尺寸,确保产品符合设计规范。此外,可以采用辅助定位技术来保证滚边的一致性。
自适应控制算法:研究和开发能够根据实时反馈调整滚边参数的自适应控制算法,以应对材料属性变化或其他生产变量,进一步提高尺寸精度和产品质量。
通过上述措施的综合应用,机器人滚边过程可以实现高效率、高精度和高质量的生产目标。


