


特点
●焊接手臂的选型
手臂有标准和加长2种类型,从小型工件到大型工件均可对应,请根据用途进行选择。
●减少碰撞损伤
伺服振动传感器的干涉检测的灵敏度提高了40%(与以往相比),并且通过减缓干涉力来减少碰撞时的损伤。
●适应于所有方式的焊接
可应用于CO2/MAG、MIG、TIG等所有方式的焊接,并能在手臂上搭载传感器等附属装置。
NB系列
●节省空间
与以往的机器相比,后方的突出部分缩短了90mm,节省了空间。
●焊接电缆的内置
电缆内置机构能防止机器人工作时的电缆的刮伤和缠绕。
●维修方便
通过采用悬臂结构,上臂从J3部到前端点为全开式,方便维修,便于电缆更换。
NV系列
●轻质的上臂
臂长由140mm(以往机型)改为134mm,上臂更轻,降低了在狭窄空间的手臂的干涉。
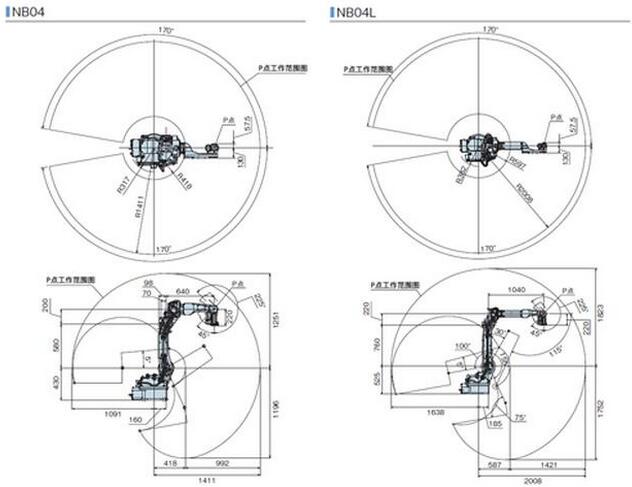
NB04/04L工作范围
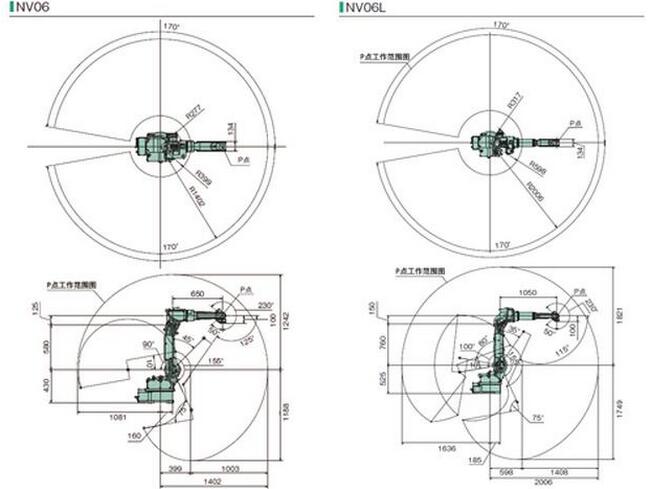
NV06/06L 工作范围
| 机器人型号 | NB04 | NB04L | |||
|---|---|---|---|---|---|
| 结构 | 关节类型 | ||||
| 自由度 | 6 | ||||
| 驱动方式 | AC伺服方式 | ||||
| 最 大 工 作 范 围 |
臂 | J1 | 旋转 | ±2.97rad( ±0.87rad)※1 | |
| J2 | 前后 | -2.71~1.57rad | -2.71~1.75rad | ||
| J3 | 上下 | -2.97~3.14rad | -2.97~3.32rad | ||
| 手腕 | J4 | 转动2 | ±2.71rad | ||
| J5 | 弯曲 | -.79~3.93rad | |||
| J6 | 转动1 | ±3.58rad | |||
| 最 大 速 度 |
臂 | J1 | 旋转 | 3.66rad/s | 3.40rad/s (3.05rad/s)※1 |
| J2 | 前后 | 3.66rad/s | 3.49rad/s | ||
| J3 | 上下 | 3.66rad/s | 3.49rad/s | ||
| 手腕 | J4 | 转动2 | 7.33rad/s | ||
| J5 | 弯曲 | 7.33rad/s | |||
| J6 | 转动1 | 10.5rad/s | |||
| 最大可搬重量 | 腕部 | 4kg | |||
| 第1臂上负荷 | 10kg ※2 | 20kg ※2 | |||
| 手腕容许 静负荷扭矩 |
J4 | 转动2 | 10.1N・m | ||
| J5 | 弯曲 | 10.1N・m | |||
| J6 | 转动1 | 2.94N・m | |||
| 手腕容许 最大惯性力矩 ※4 |
J4 | 转动2 | .38kg・m2 | ||
| J5 | 弯曲 | .38kg・m2 | |||
| J6 | 转动1 | .03kg・m2 | |||
| 位置重复精度 | ±.08mm ※3 | ||||
| 周围温度 | 0~45°C | ||||
| 周围湿度 | 20~80%RH (应无结露) | ||||
| 振动值 | 0.5G以下 | ||||
| 设置条件 | 落地、吊挂、壁挂 | ||||
| 主机重量 | 170kg | 280kg | |||
| 机器人型号 | NV06 | NV06L | |||
|---|---|---|---|---|---|
| 结构 | 关节类型 | ||||
| 自由度 | 6 | ||||
| 驱动方式 | AC伺服方式 | ||||
| 最 大 工 作 范 围 |
臂 | J1 | 旋转 | ±2.97rad( ±0.87rad)※1 | |
| J2 | 前后 | -2.71~1.57rad | -2.71~1.75rad※2 | ||
| J3 | 上下 | -2.97~3.32rad | -2.97~4.54rad※3 | ||
| 手腕 | J4 | 转动2 | ±3.14rad | ||
| J5 | 弯曲 | -0.87~4.01rad | |||
| J6 | 转动1 | ±6.28rad | |||
| 最 大 速 度 |
臂 | J1 | 旋转 | 3.66rad/s (2.61rad/s)※1 |
3.40rad/s (3.05rad/s)※1 |
| J2 | 前后 | 3.66rad/s | 3.49rad/s | ||
| J3 | 上下 | 3.66rad/s | 3.49rad/s | ||
| 手腕 | J4 | 转动2 | 7.33rad/s | ||
| J5 | 弯曲 | 7.33rad/s | |||
| J6 | 转动1 | 10.82rad/s | |||
| 最大可搬重量 | 腕部 | 6kg | |||
| 第1臂上负荷 | 10kg ※4 | 20kg ※4 | |||
| 手腕容许 静负荷扭矩 |
J4 | 转动2 | 11.8N・m | ||
| J5 | 弯曲 | 9.8N・m | |||
| J6 | 转动1 | 5.9N・m | |||
| 手腕容许 最大惯性力矩 ※6 |
J4 | 转动2 | .30kg・m2 | ||
| J5 | 弯曲 | .25kg・m2 | |||
| J6 | 转动1 | 0.06kg・m2 | |||
| 位置重复精度(*7) | ±0.08mm | ||||
| 周围温度 | 0~45°C | ||||
| 周围湿度 | 20~80%RH (应无结露) | ||||
| 振动值 | 0.5G以下 | ||||
| 设置条件 | 落地、吊挂、壁挂型 | ||||
| 主机重量 | 160kg | 280kg |
|||




