-
-
-
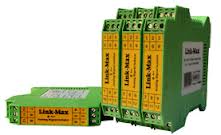
Guidance 1400 机器人控制器
Guidance 1400是美国Precise Automation公司设计和生产的通用型嵌入式驱控一体的机器人控制器。单控制器可以控制4轴,并集成4路伺服驱动。多控制器并联可控制多达32轴。PA公司具备30多年机器人控制器的开发应用经验。
-
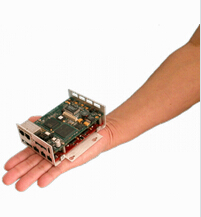
Guidance 2400 机器人控制器
Guidance 2400是美国Precise Automation公司设计和生产的通用型嵌入式驱控一体的机器人控制器。单控制器可以控制4轴,集成4路伺服驱动,并可扩展到6轴和6路驱动。多控制器并联可控制多达32轴。PA公司具备30多年机器人控制器的开发应用经验。
-
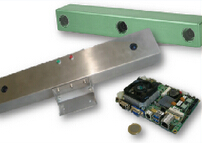
CRMI系列大型检测机器人
Cyborg-Lab公司有四大产品系列,包括水平搬运机器人、大型LCD检测机器人、运动控制单元/系统和特种机器人。Cyborg-Lab公司产品技术先进,拥有多项相关领域国际专利。,是多家韩国顶尖企业的供应商。
-
硅片/基板水平搬运机器人
CR系列是韩国Cyborg-Lab公司设计和生产的硅片/LCD水平搬运机器人。Cyborg-Lab公司有四大产品系列,包括水平搬运机器人、大型LCD检测机器人、运动控制单元/系统和特种机器人。Cyborg-Lab公司产品技术先进,拥有多项相关领域国际专利,是多家韩国顶尖企业的供应商。
-
Furo导引机器人
Furo-S/D是韩国FutureRobot公司设计和生产的交互式多媒体导引机器人。Furo机器人概念新颖,功能齐全。甫一面世就得到了世界各地客户的欢迎。FutureRobot也一跃成为韩国服务机器人行业中的明星企业。
-
-
SRI 6轴力/力矩传感器
6轴力/力矩传感器可测量力及力矩的6个要素,可运用于机器人等各个领域。该传感器具有6个输出通道,每个通道拥有一个独立的应变片桥(满量表下输出0.6 – 3.0 mV/V)。一个标准的放大器可用于进行信号调整及数据采集。
-
3DV 立体感知系统
3DV是一个感知系统(带有2个摄像机的单个盒子),根据双镜头的图像采集,进行完整的3D景象重构。基于Vislab多年研发的专有算法,3DV能够快速的重构环境、确定并追踪障碍物、评估地势表面及坡度。
-
-
HEBI机器人构建块
HEBI机器人构建块,功能强大,操作组装简单,兼容性强等特点使解决方案更快,更好,更便宜。当HEBI机器人模块被重新配置时能够自动感测相邻的模块位置,以允许High-Level的进程来自动理解新的配置和动力。
-
BioTac 多模仿生触觉传感器
BioTac 是 SynTouch LLC 公司推出的世界上第一款具备:三维力、热感应、微振的多模仿生触觉传感器,在与物体接触时可以同时检测:三维力、微振、热度等变化。
-
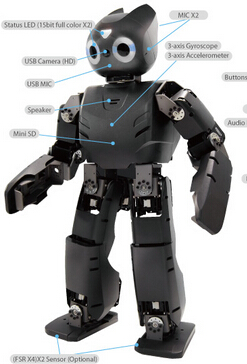
DARwIn-OP 开放平台仿人机器人
DARwIn-OP(Dynamic Anthropomorphic Robot with Intelligence–Open Platform) 智能机器人是一个微小型仿人智能机器人。其特点是高效率,高计算能力、精密的传感器配置、大负载能力、动态移动能力。可应用于各种研究及教学项目。
-
Kingfisher 水上移动飞船
Kingfisher水上移动飞船有两个应用方向:研究者可将该产品作为一个非常好的无人驾驶水上飞船;环境专家可将其作为远程探测系统,用于航海及相关数据收集。
-
Summit轻量型移动平台
Summit轻量型移动平台的机械系统相当于具有高强度的铝制车架的四驱越野车。每个轮子都配有一个独立的驱动电机、独立的减震系统以及摆式配重来提高它的稳定性。
-
Guardian混合型移动平台
Guardian 混合型移动平台是一款优秀的模块化移动机器人开发平台,通过集成一些传感器(如:激光、摄像头、麦克风、双目视觉、GPS、惯性测量单元等)可用于军事、科研、安防、探测等环境中。
-
-
Grizzly 大负载重型移动平台
Grizzly适用于在恶劣复杂的室外环境中航行。配备了4个高扭矩电机,高底盘,全地形轮胎,Grizzly能将您的机器人带到新的超越极限的地方。基于开源的ROS,利用Grizzly进行复杂程序操作变得更为简便。丰富的示例及辅导材料帮助您更快更轻松的开始工作。配备了便利的电源接口及输入输出接口。
-
Husky A200 室外移动平台
HUSKY A200 是一款适合于工业、军事工程领域的中型室外机器人的移动平台。移动平台采用高扭矩的4轮驱动和13英寸宽距轮胎保证该移动平台具有良好的越野性能。配有5V/12V/24V的供电电源、标准的工业导轨及充足的内部空间保证可客户可在后续非常方便对此移动平台进行集成及二次开发。此外,配有电子锁定及制动的外部控制面板使得客户可随时对移动平台进行锁定及制动操作,使移动平台具有非常好的安全性。
共6271条记录,每页显示20条,当前第10/314页
[首页] [上页] [7] [8] [9] [10] [11] [12] [下页] [尾页]